My my how time flies. It’s been two years since I built my first drawing machine, a vertical pen plotter. I’ve since then built two more machines using the same hardware, but different sizes, and made over a hundred drawings and experiements. I even had a one month exibition at a tiny local cafe. Nerd… Fortsett å lese Ideas for Drawing machine #1
Stikkord: arduino
Drawing machine #2
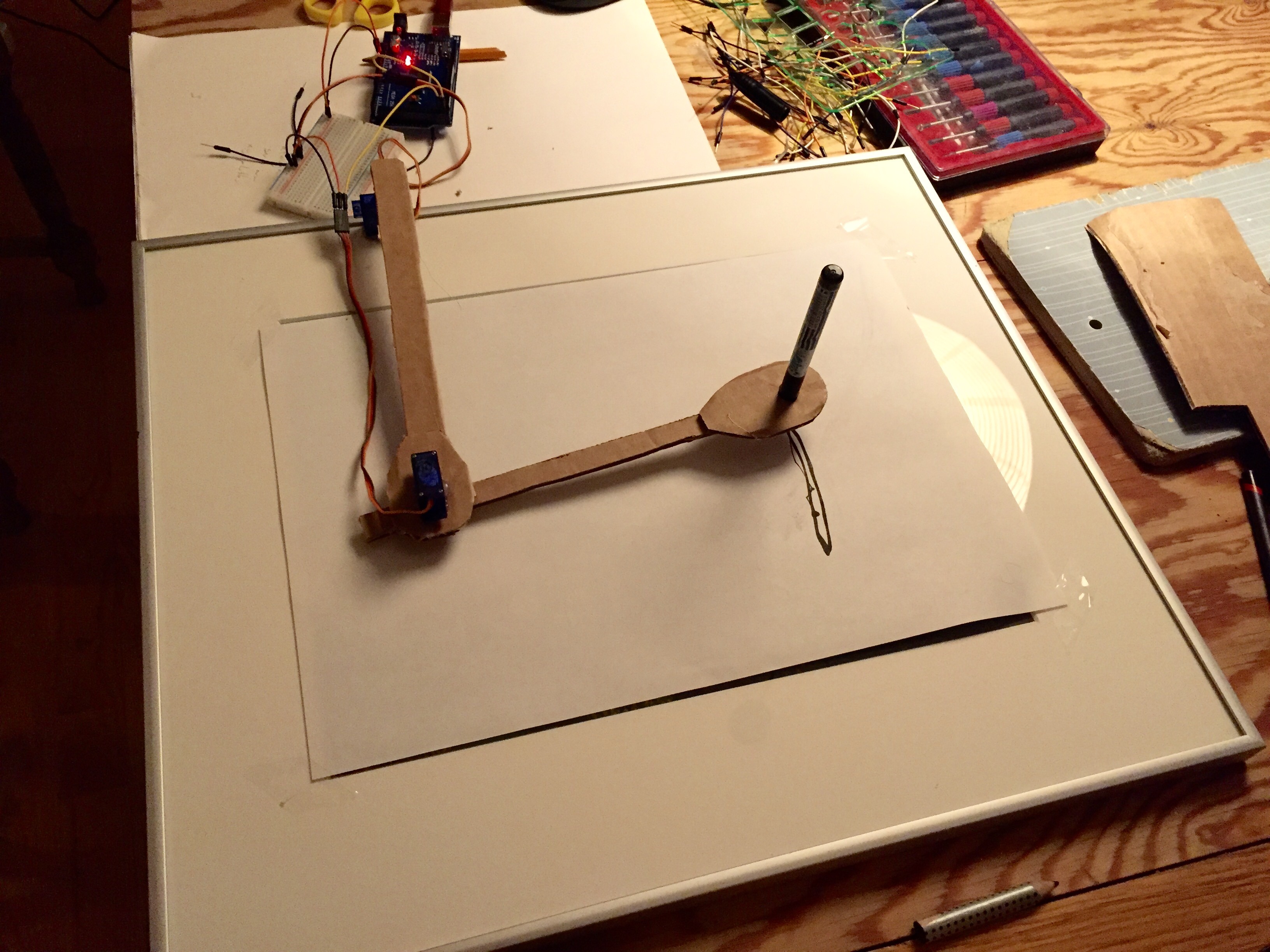
This drawing machine is built with cardboard, hotglue and servos.
Drawing machine #1
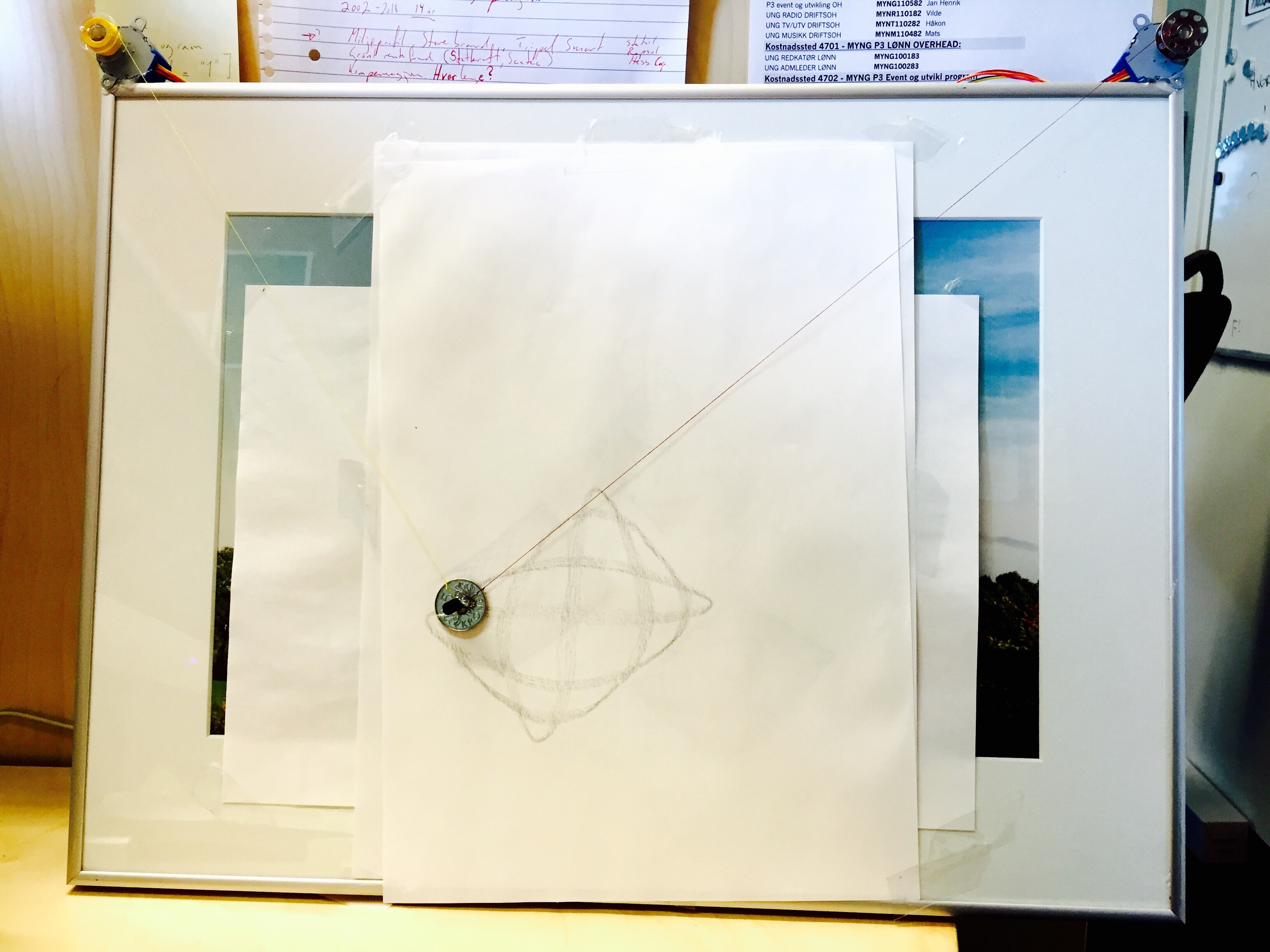
This has been on the todolist for a few years, but today I finally got around to building my first drawbot using Arduino. I wanted to make something that was light, minimal and portable, that can be added to any flat surface with a gluegun. I use small steppermotors with bobbins (from eBay) and thread… Fortsett å lese Drawing machine #1